이번 시간에는 Works2에서 상승펄스와 하강펄스 신호에 대해 알아보겠습니다.
상승펄스 하강펄스 그게 뭐냐?
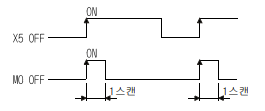
우선 메뉴얼 상의 타이밍 차트를 보겠습니다. 타이밍 차트를 보면 대강 감이 오실겁니다.
 |
 |
| 상승 펄스 타이밍 차트 | 하강 펄스 타이밍 차트 |
상승 펄스는 입력신호가 들어오는 순간 신호가 1회 출력되며
하강 펄스는 입력신호가 떨어지는 순간 신호가 1회 출력됩니다.
즉, 상승 펄스는 스위치를 누르는 순간, 하강 펄스는 스위치를 누르고 떼는 순간 신호가 출력된다고 보시면 됩니다.
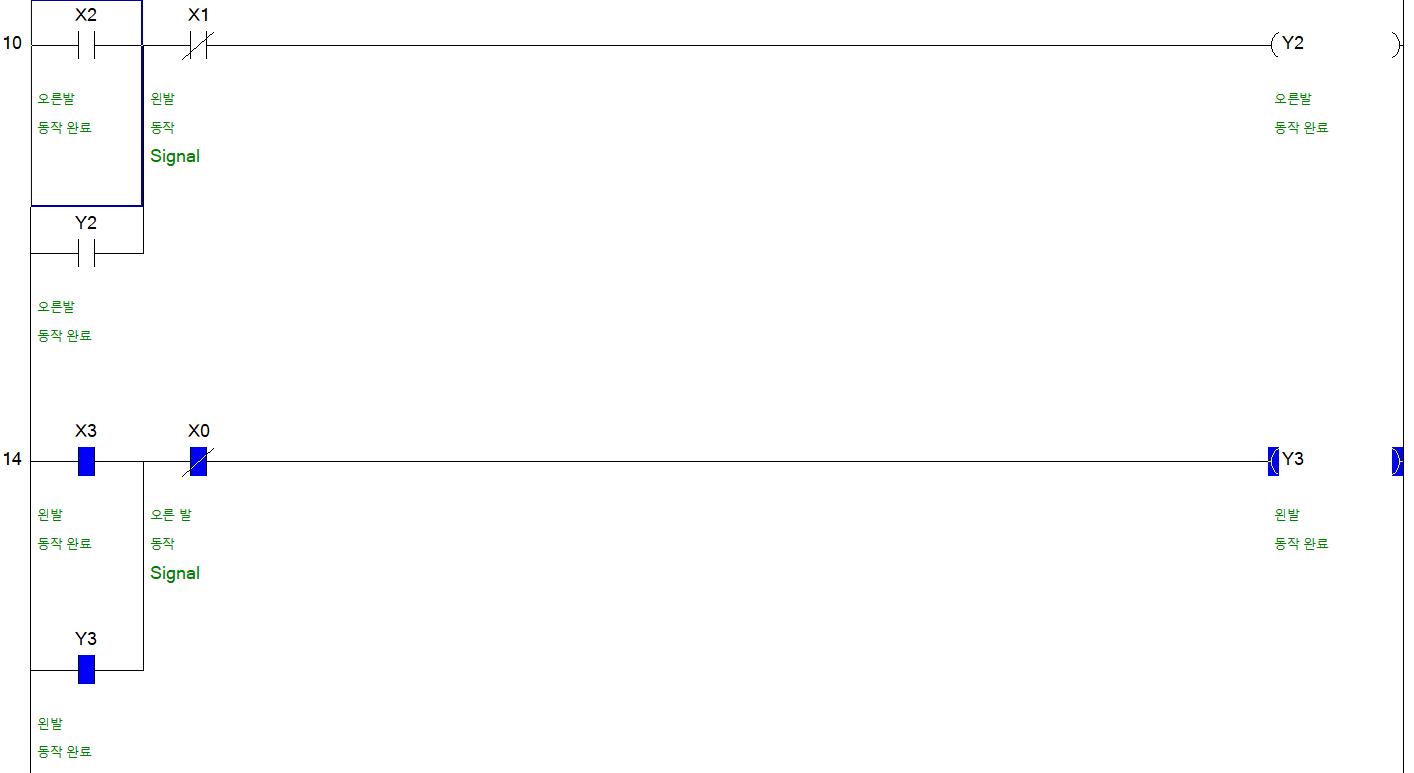
그럼 이번엔 프로그램을 통해 상승 펄스, 하강 펄스에는 어떤 명령어가 있고 어떻게 사용하는지 알아봅시다.
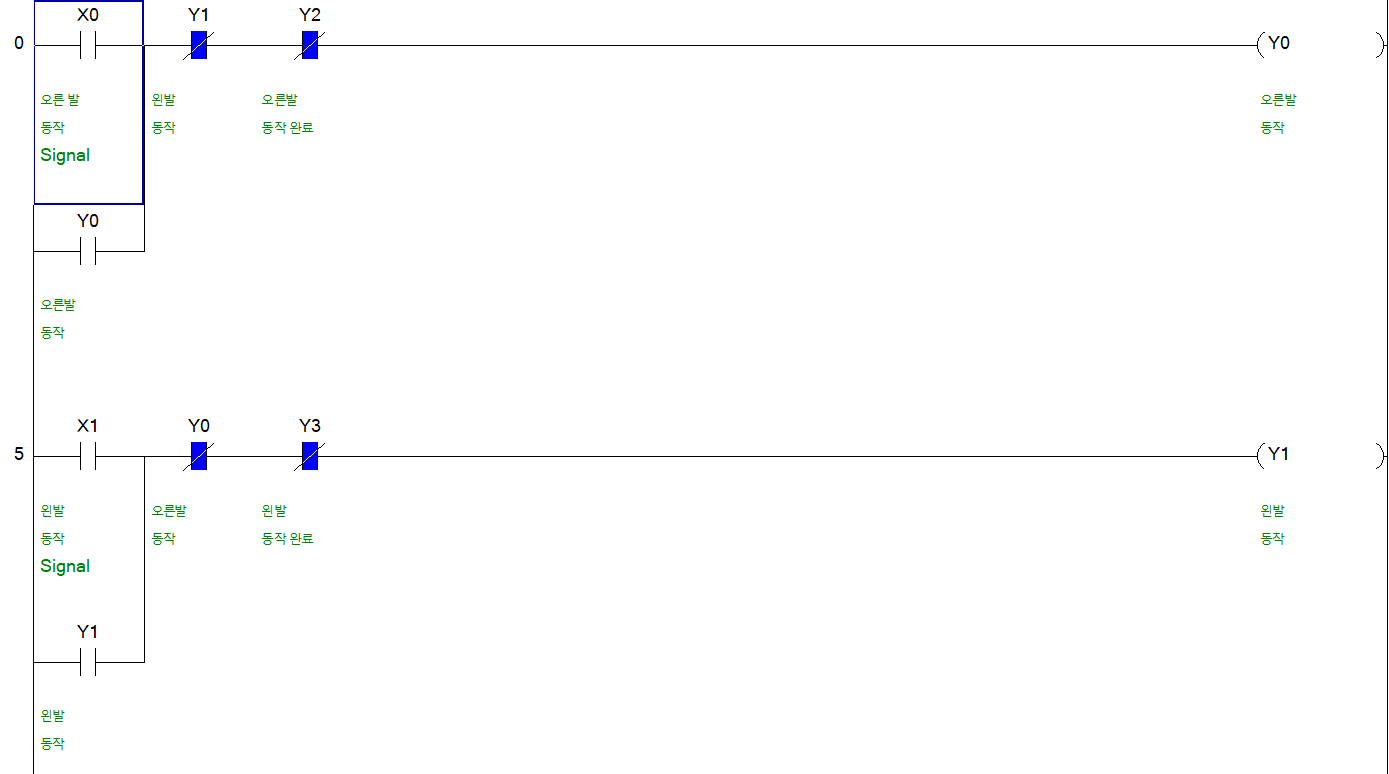
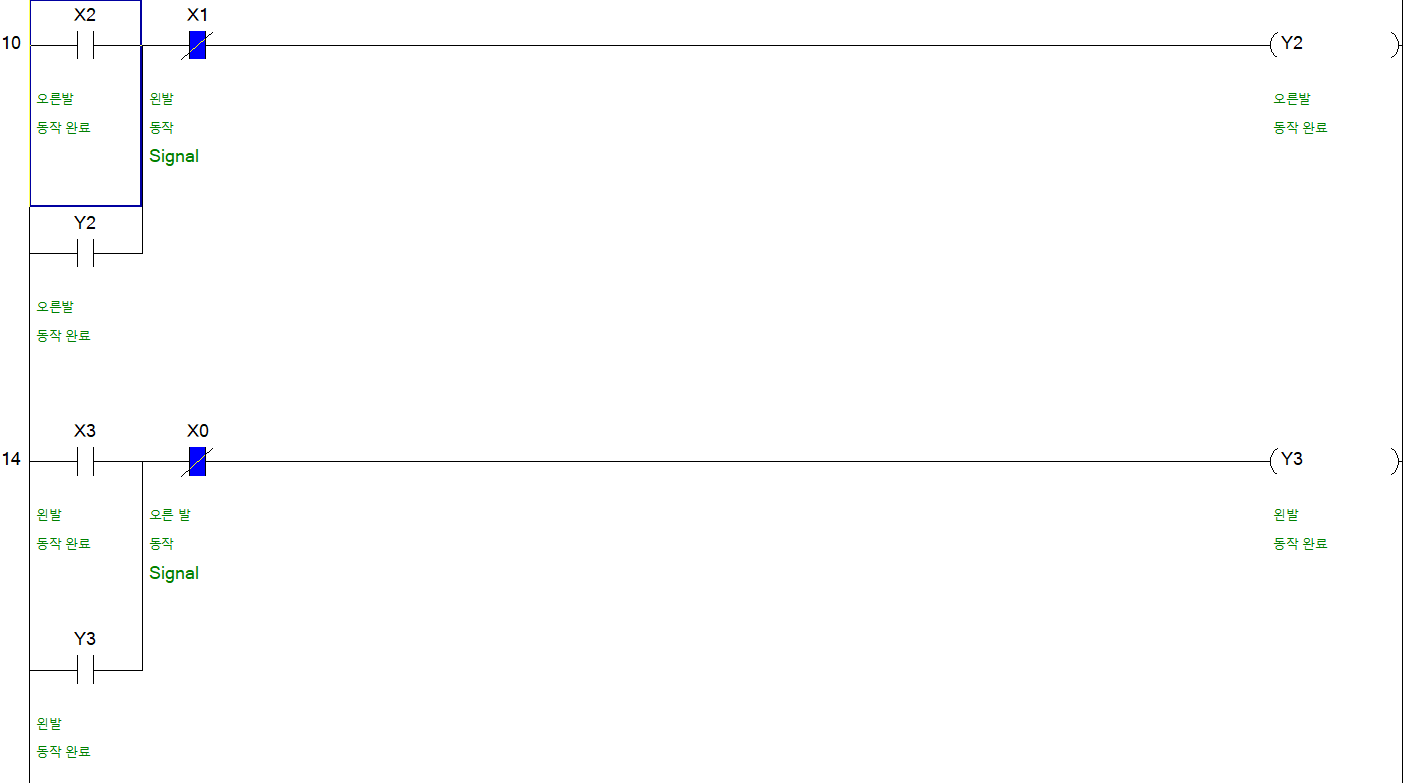
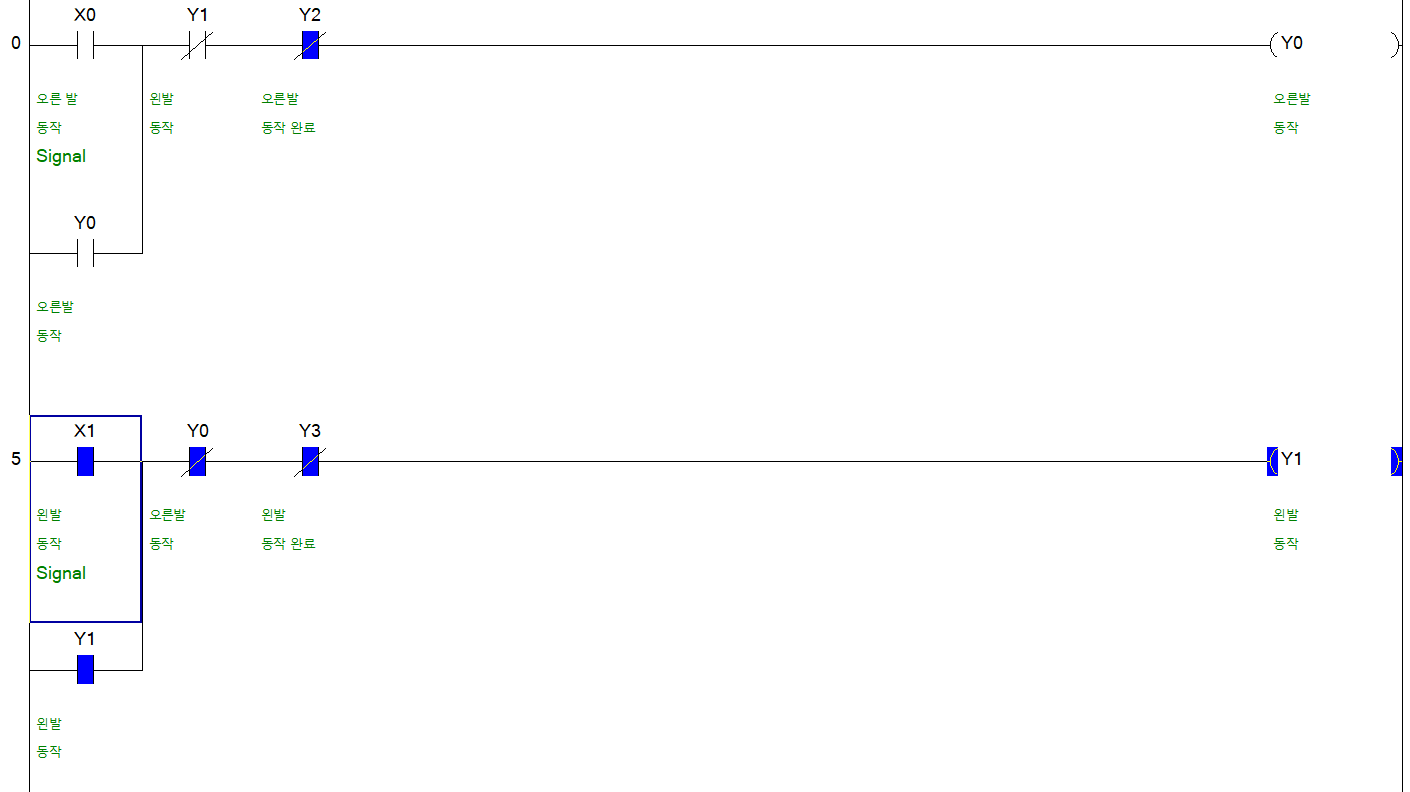
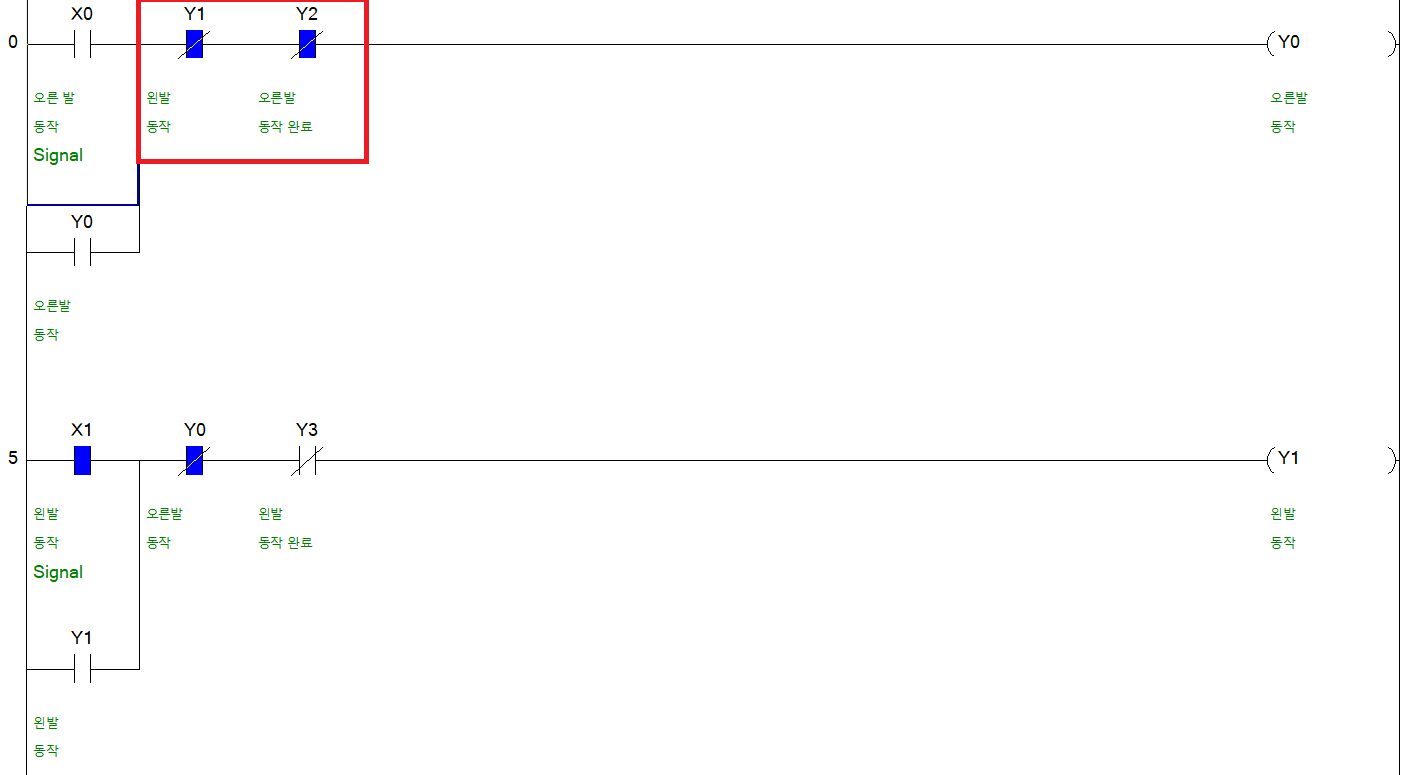
1. Shift + F7을 누른 후 X0을 입력후 출력 Lamp Y0을 만들어줍니다.
X0을 입력 하는 순간 Y0이 On 되었다 Off되는걸 볼 수 있습니다.
(스캔 처리상 보이지 않기에 동작테스트는 직접 해보시길 바랍니다.)

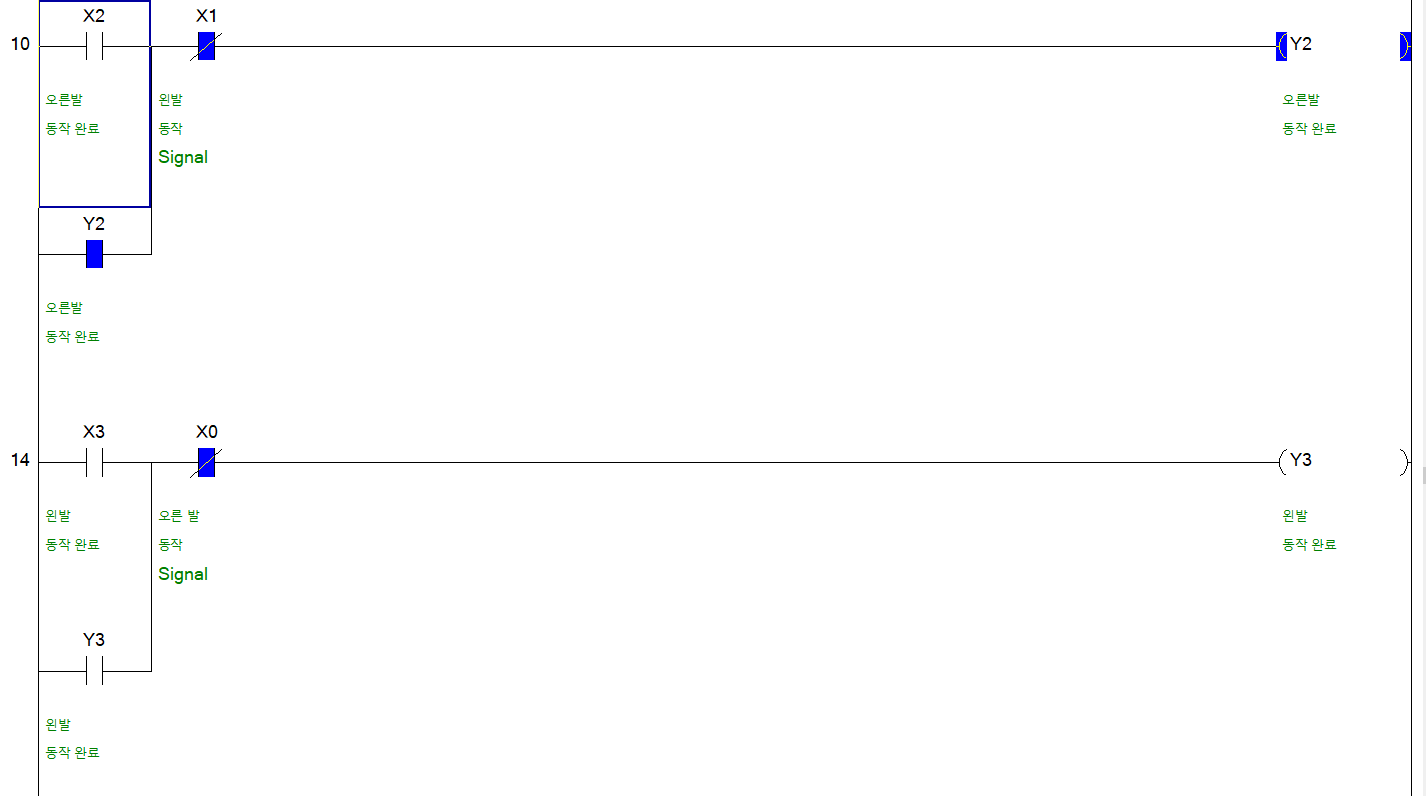
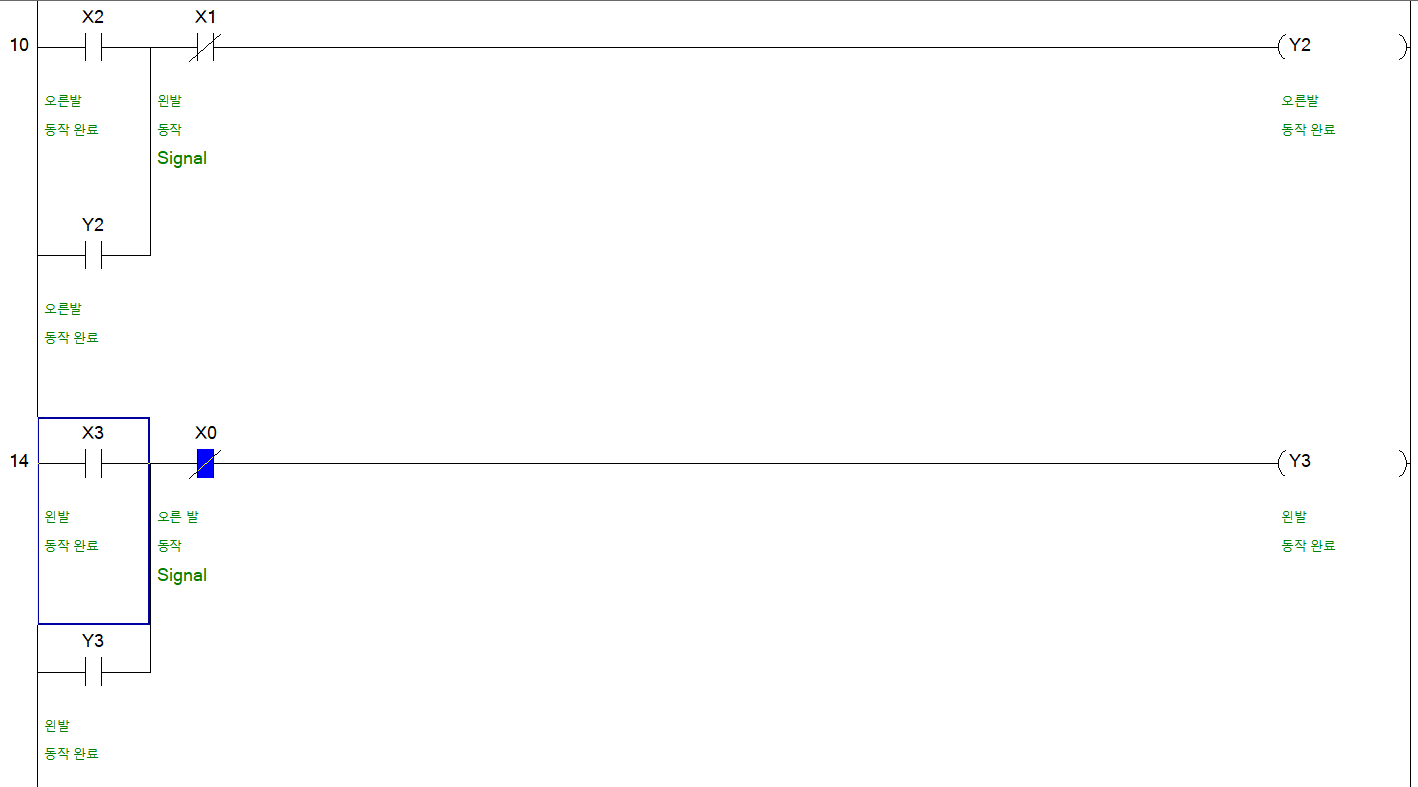
2. 이번엔 하강 펄스 프로그램을 작성 해줍니다. Shift + F8을 누른 후 X1 입력후 출력 Lamp Y1을 만들어 줍니다.
X1을 강제입력 해제 하는 순간 Y1이 On 되었다 Off되는걸 볼 수 있습니다.

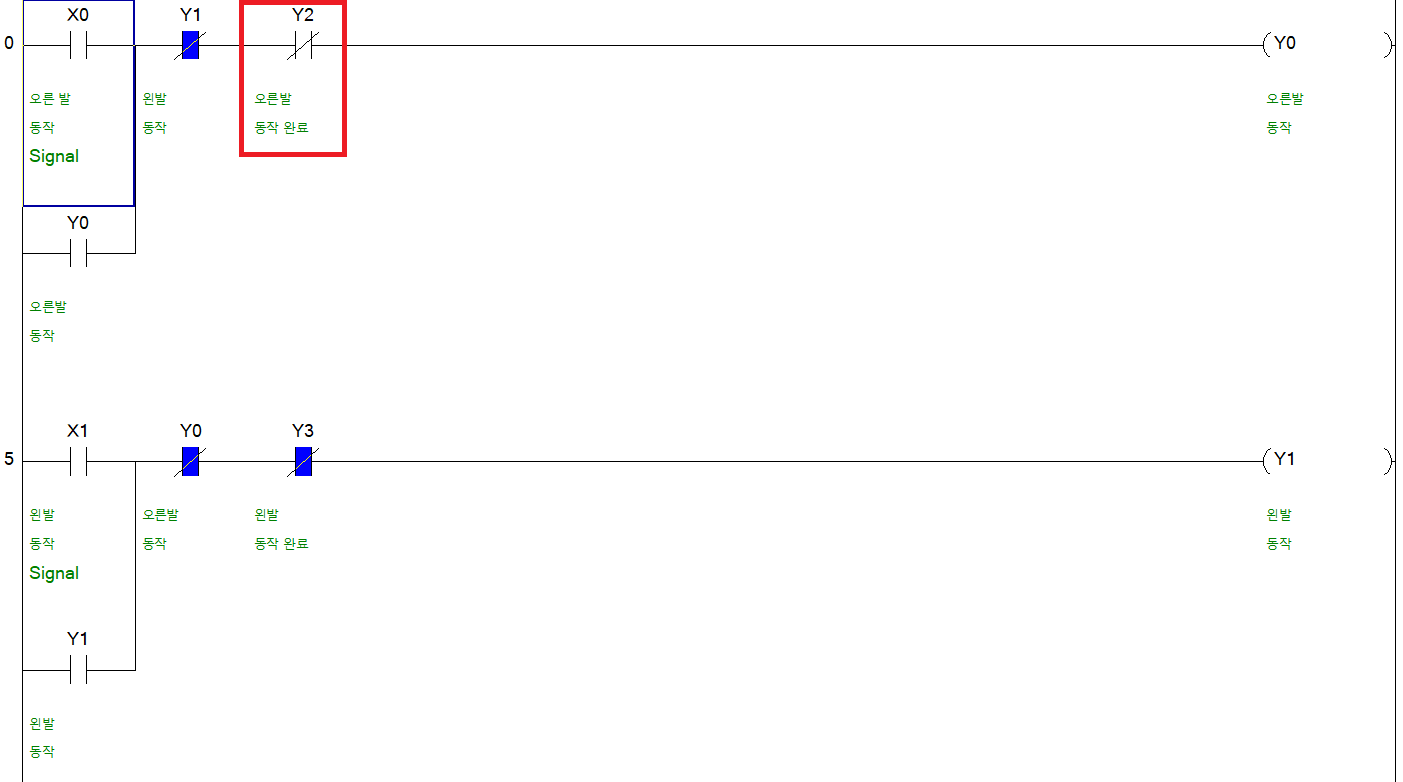
3. Works2에서는 펄스를 쓰는법이 몇가지 존재 하여 그부분만 짚고 마무리 짓도록 하겠습니다.
상승펄스 : 모두 다 같은 표현 입니다.
2번째 라인의 ↑는 해당 위치에서 Alt+F5를 눌러주면 됩니다.
3번째 라인의 PLS는 출력쪽에 입력 할 수 있는 상승 펄스 입니다.

하강펄스 : 마찬가지로 모두 같은 표현입니다.
2번째 라인의 ↓ 는 해당 위치에서 Ctrl + Alt + F5를 눌러주면 됩니다.

사람마다 프로그램 방식이 다 다르므로 알고 계시면 내 프로그램 말고 다른사람의 프로그램을 봤을때
당황하지 않고 해석 가능 하실겁니다.
'PLC > Mitsubishi Q' 카테고리의 다른 글
| 10. 데이터 디바이스(D) 와 MOV 명령어 (0) | 2020.11.13 |
|---|---|
| 9. FF 명령어 ( flip-flop 회로) (1) | 2020.11.11 |
| 4. 인터록? (2) | 2020.11.07 |
| 3. 내부릴레이M을 사용한 자기유지 회로 (0) | 2020.11.07 |
| 2. A접점? B접점? (0) | 2020.11.05 |