기본 명령어에 대해 얼추 알았으니 이제부터 명령어를 활용하여 Program을 작성해 보도록 하겠습니다.


메뉴얼을 보면 D로 지정된 디바이스 부터 n점을 왼쪽으로 1비트씩 시프트 한다고 나와 있습니다.
비트를 왼쪽으로 시프트한다고 하는데 정확히 어떤 동작인지 Program을 통해 확인 하겠습니다.
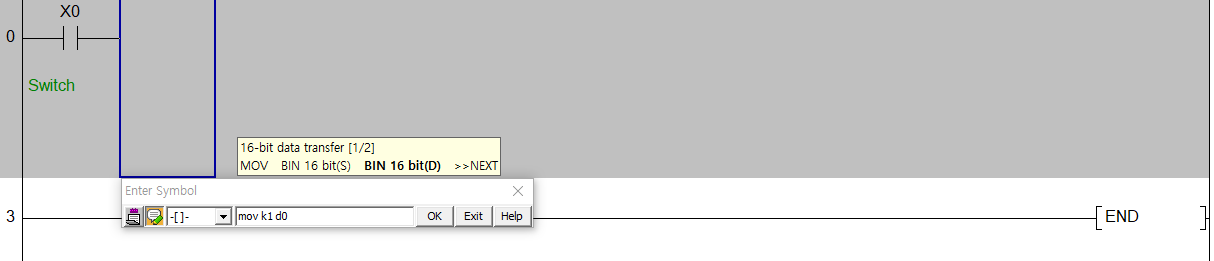
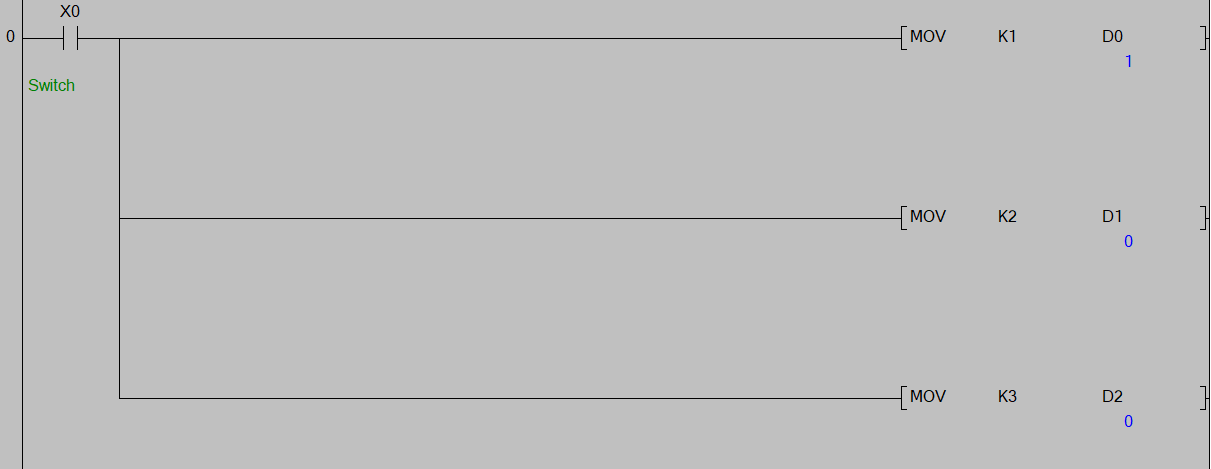
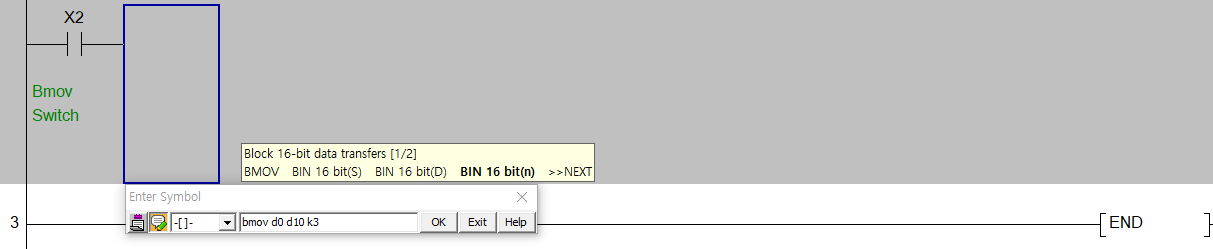
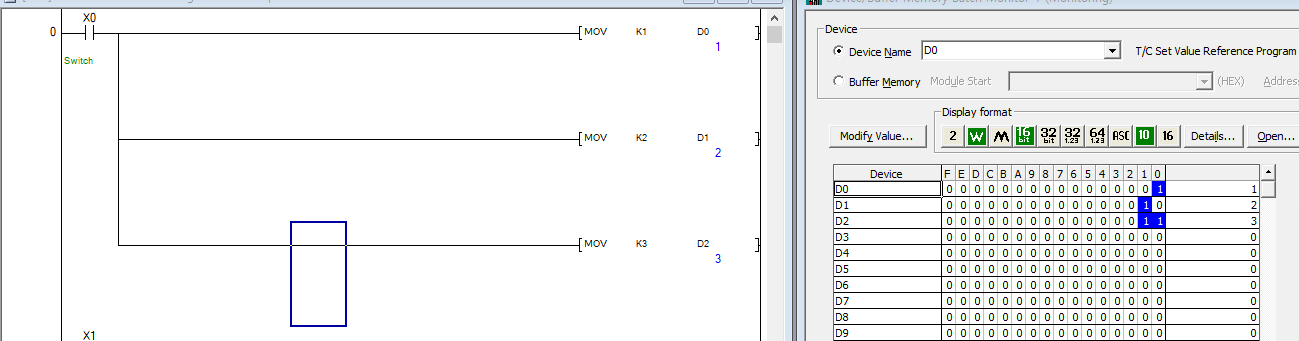
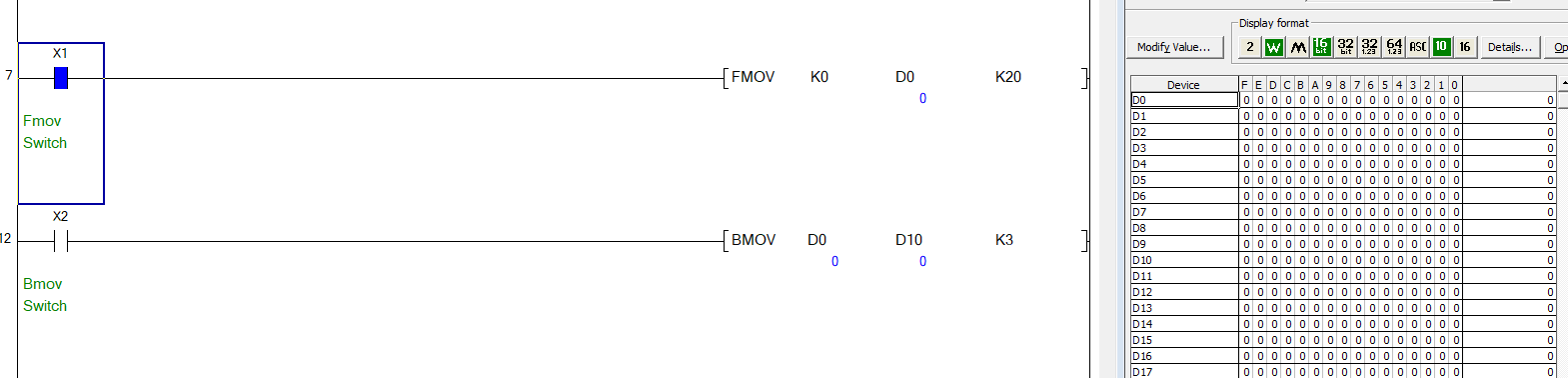
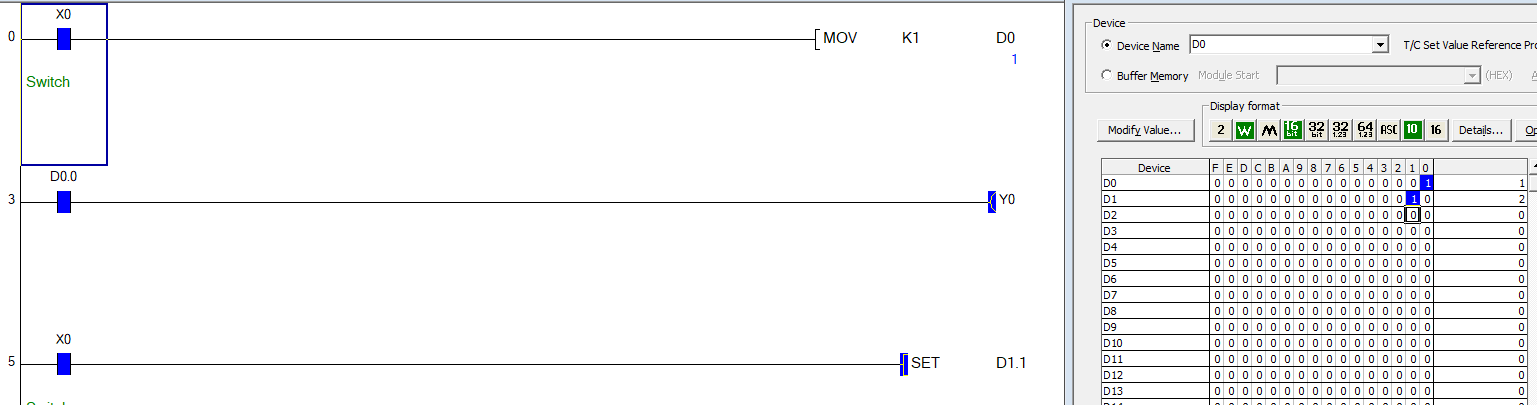
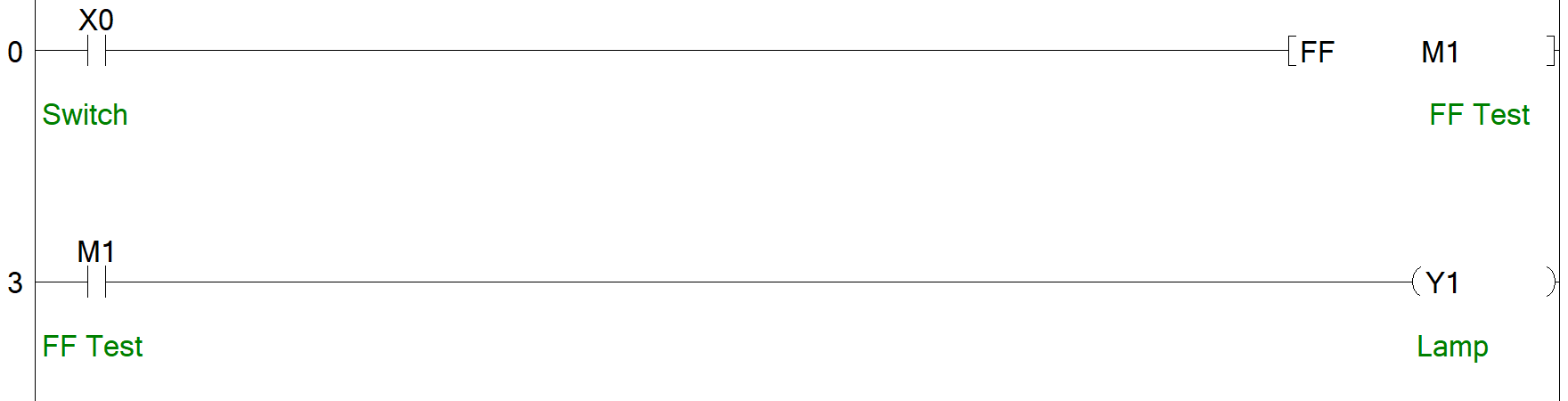
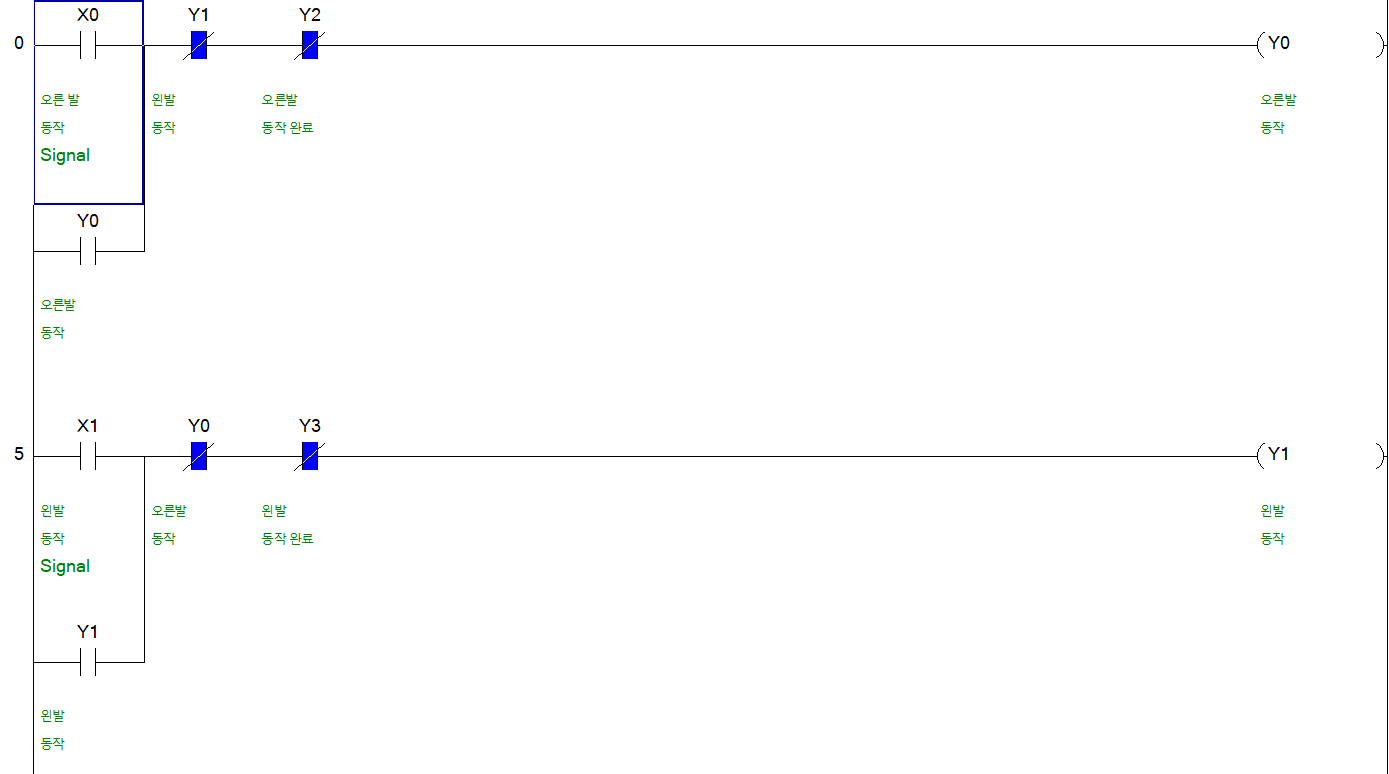
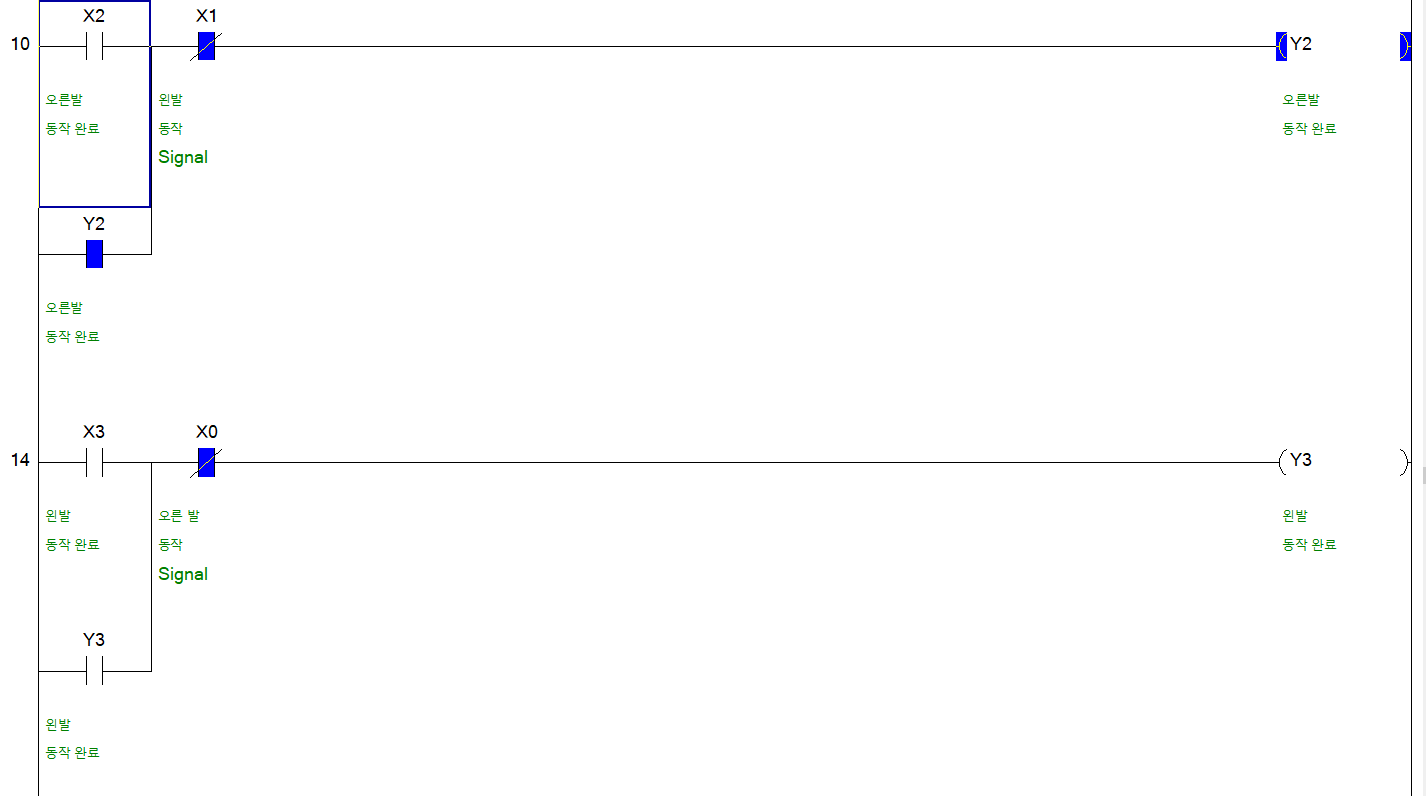
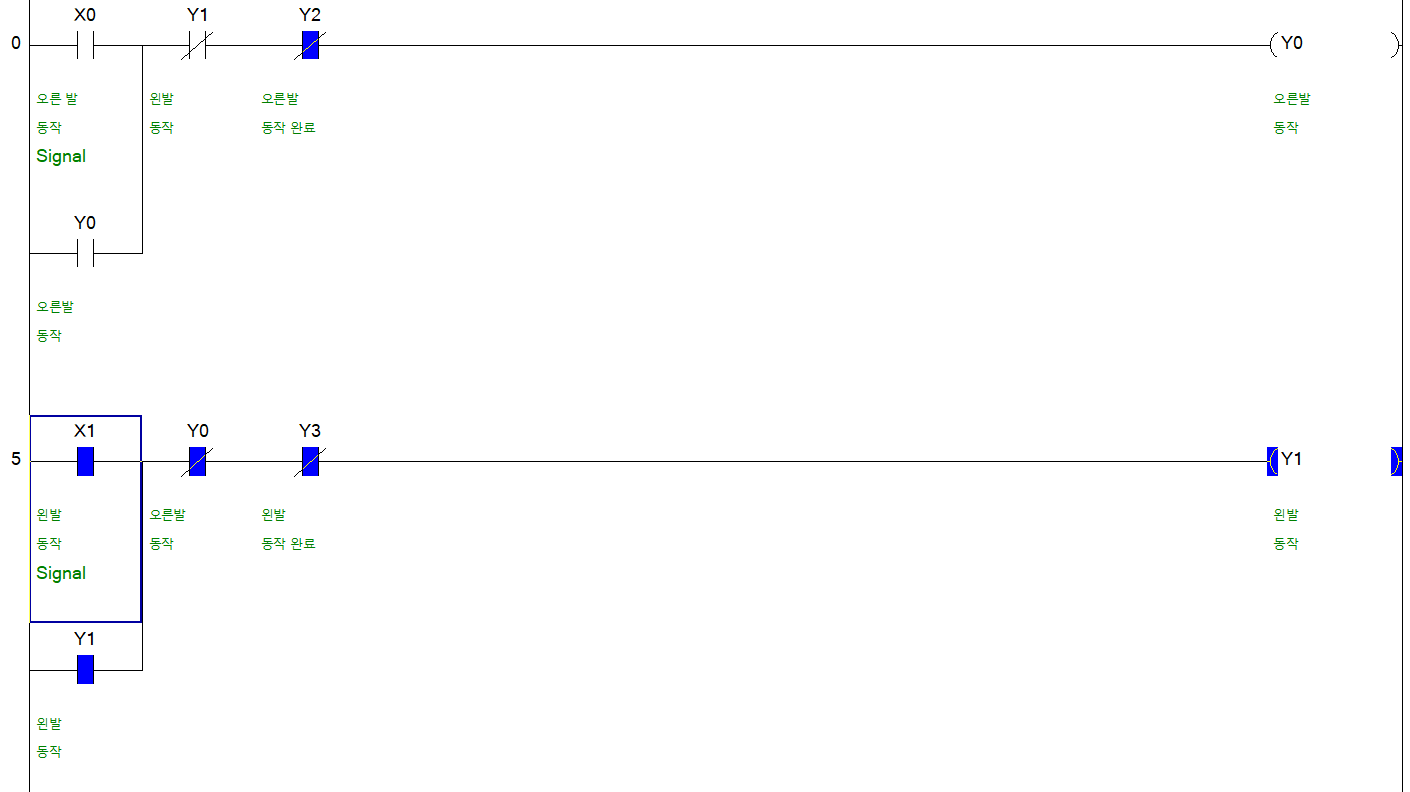
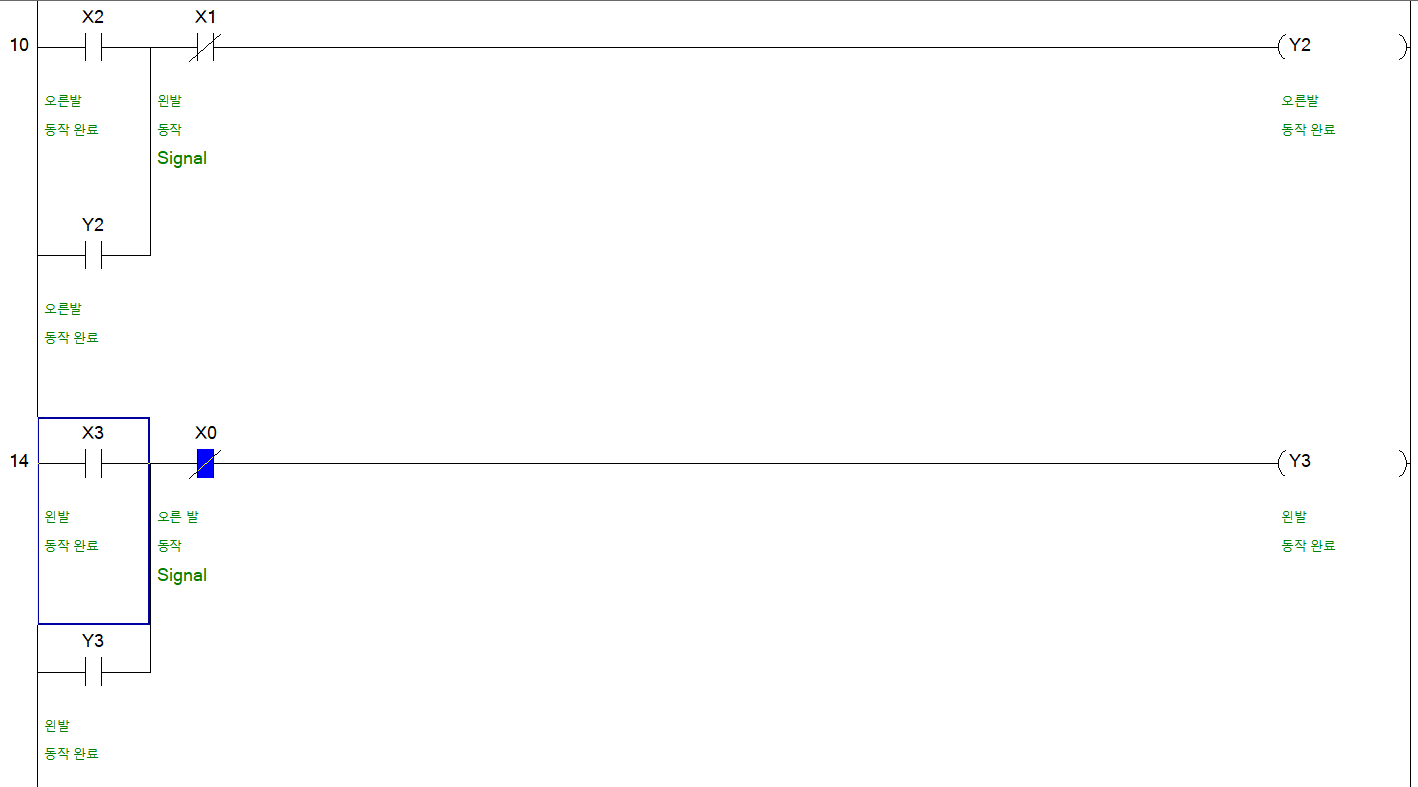
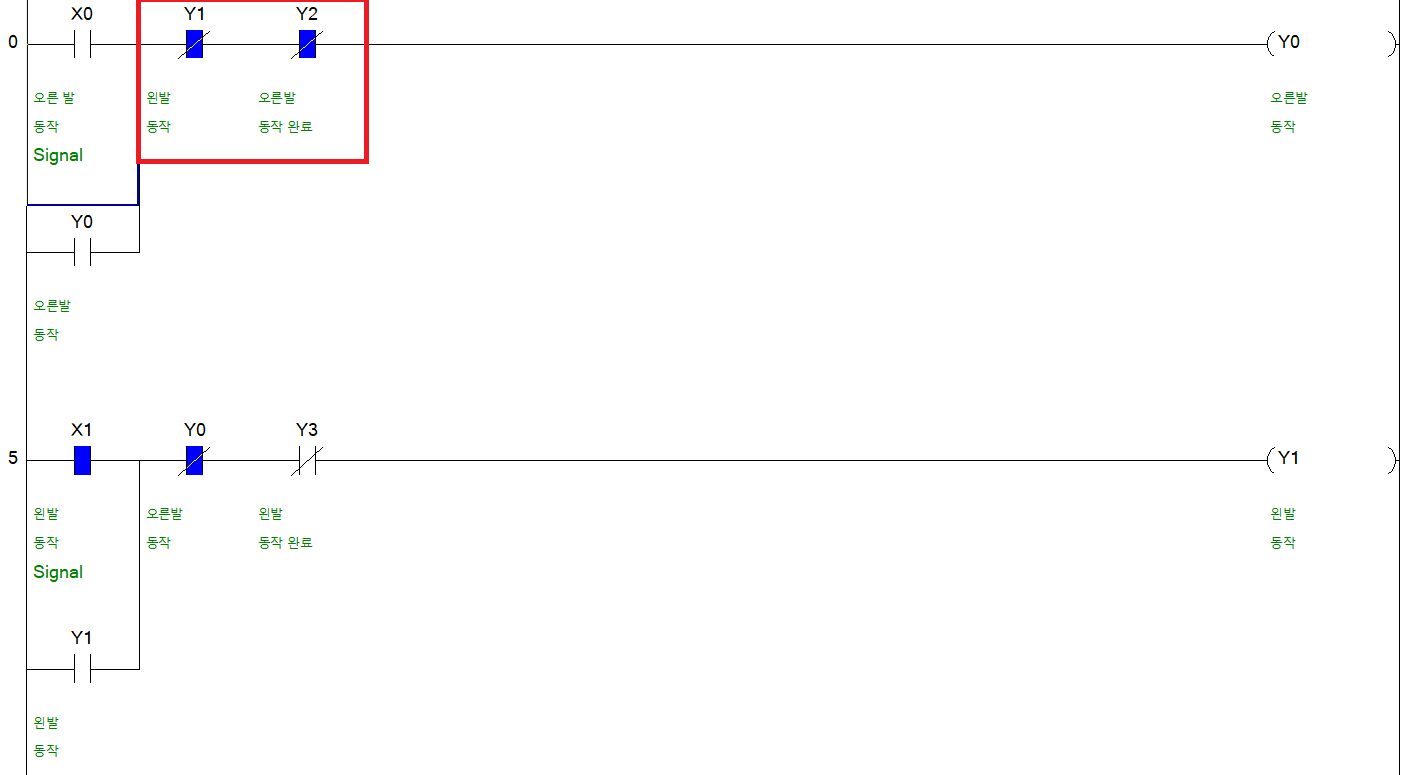
아래 사진과 같이 Program 작성 했습니다.
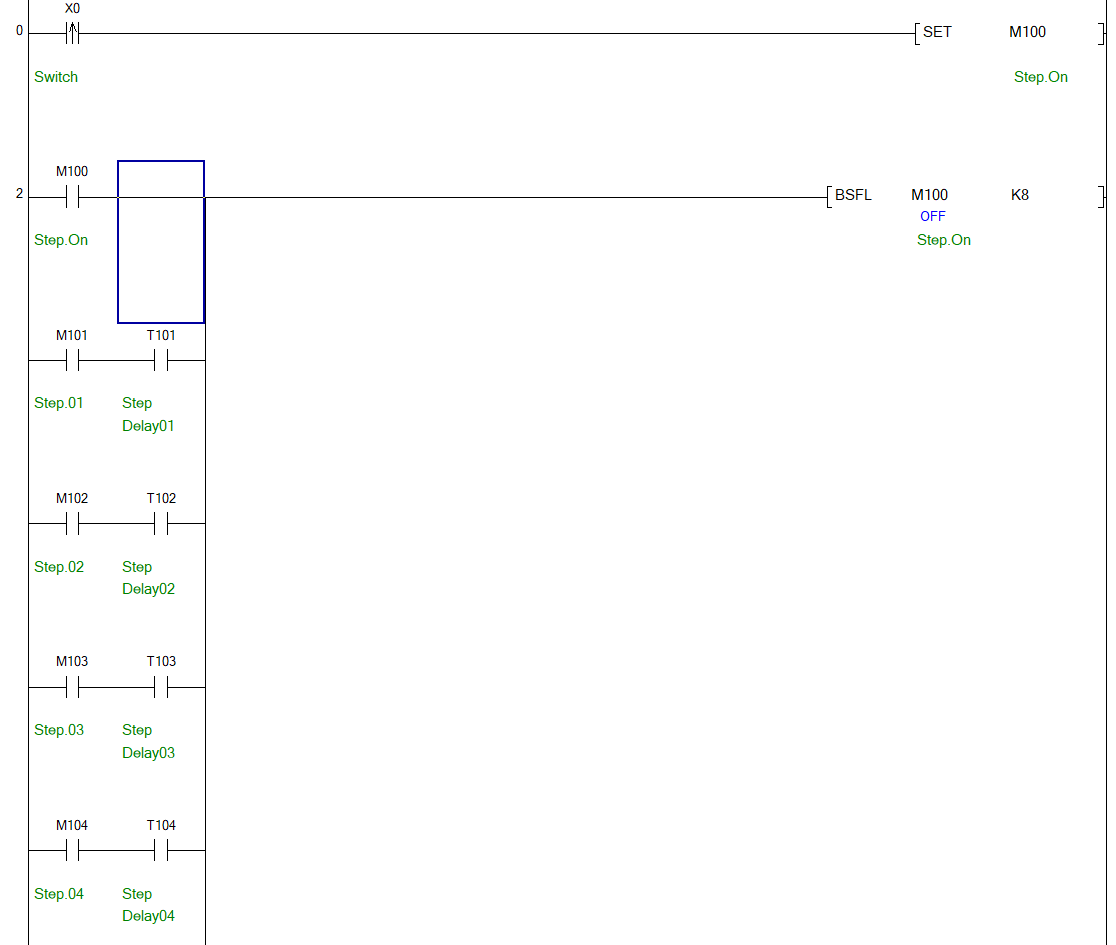

BSFL 사용하여 간단한 스탭 Program을 구성하였습니다.
그럼 Program을 설명 해드리겠습니다.
0번 Step을 보시면 X0이 펄스입력으로 들어가면 Set 명령어에 의해 M100이 Set됩니다.
2번 Step에서 M100이 셋되어 BSFL명령어가 실행됩니다.
(BSFL M100 K8은 무슨뜻인가? M100부터 M108까지 들어가있는 데이터를 왼쪽으로 1회 쉬프트 하라는 뜻입니다.)
BSFL이 실행되며 M100이 M101로 이동 되며 M100은 0이 되어 Reset됩니다.
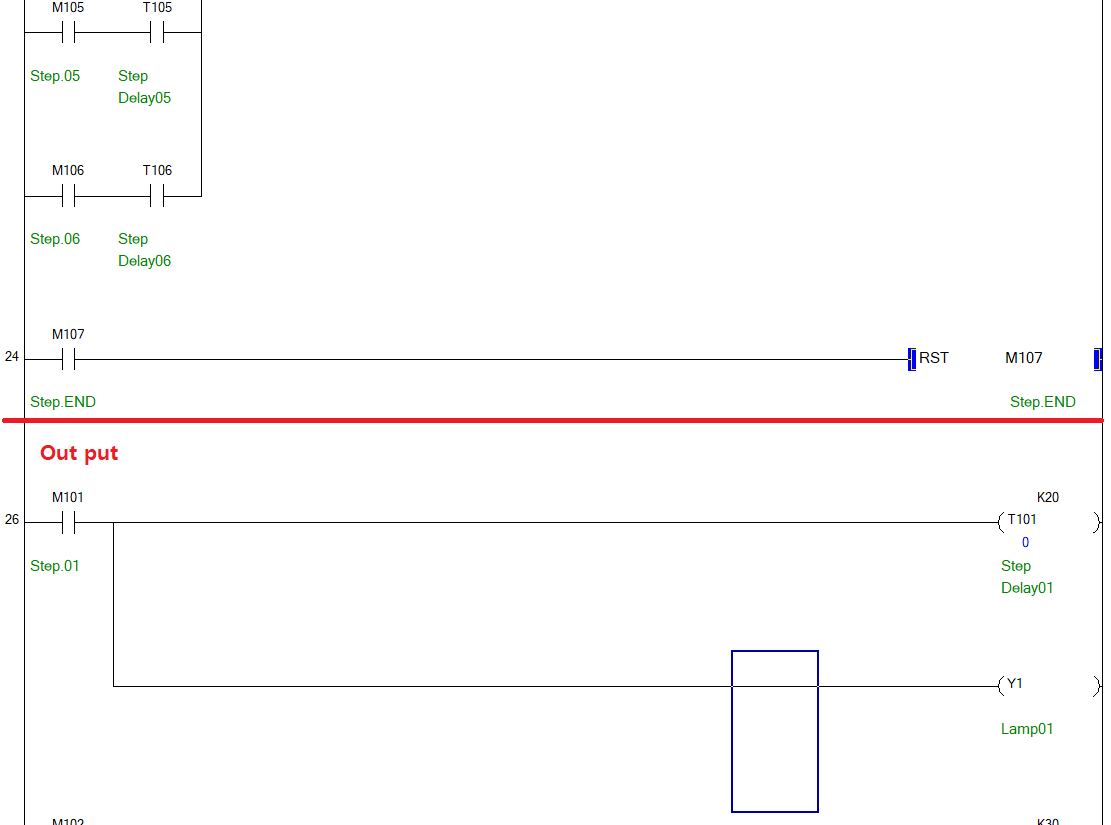
3번 Step에서 M101이 ON되어 타이머 T101 ON되어 2초후 BSFL 명령어가 다시 ON 되어 M101이 M102로 이동됩니다.
M102로 이동하며 M101은 OFF 됩니다. 이러한 동작을 M106까지 작동하며 M107이되면 스스로를 RST 시켜
Step이 종료 됩니다.
M100번부터 Step 01로 사용하여되 되나, 스텝 번호와 M영역을 맞추면 보기 편리하기에 M100은 Step 시작 bit로 사용하였습니다.
실제로 사용할때는 타이머 부분에 인터락, 즉 Step이 진행 되기 위한 조건을 넣어주면 됩니다.
예를들어 첫번째 동작이 실린더가 전진하고 다음 스탭 진행 으로 가정아겠습니다.
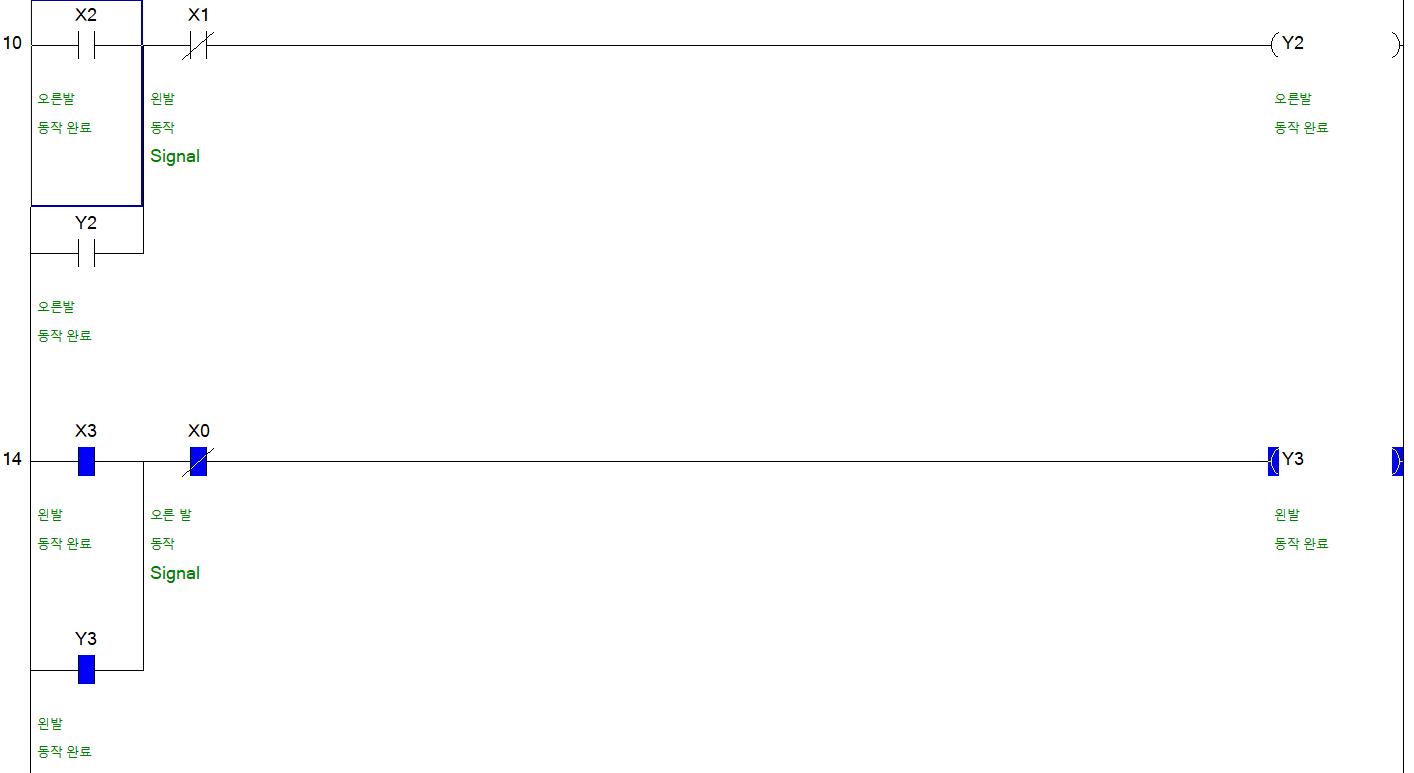
M101이 On되었을 경우 츨력단에 M101로 Sol V/V를 On시켜주면 됩니다.
그리고 다음스탭으로 진행되기 위해서는 실린더가 전진 상태가 되어야 하기때문에
M101 뒤에 T101대신 실린더 센서 X??을 입력해 주면,
실린더가 전진한걸 확인한 후에 다음 스탭이 진행되게 됩니다.

동영상을 통해 스탭 진행을 확인해 보세요
이번시간에는 BSFL을 사용한 Step제어를 알아보았습니다.
다음시간에는 BSFL Step제어를 이용하여 자동 Program을 작성해 보도록 하겠습니다.
'PLC > Mitsubishi Q' 카테고리의 다른 글
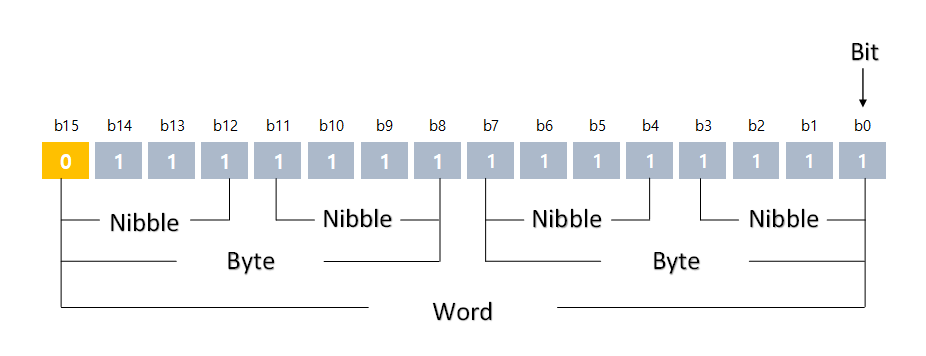
| 11. Bit? Word? (0) | 2020.11.13 |
|---|---|
| 10. 데이터 디바이스(D) 와 MOV 명령어 (0) | 2020.11.13 |
| 9. FF 명령어 ( flip-flop 회로) (1) | 2020.11.11 |
| 8. 상승펄스? 하강펄스? (0) | 2020.11.11 |
| 4. 인터록? (2) | 2020.11.07 |